Следование по траектории.
После того, как освоены принципы следования объектов (День пятый), можно перейти к одному из самых популярных заданий для лего-роботов: следование черной линии.

Тут работу можно разделить на три этапа: робот с одним датчиком освещенности, с двумя датчиками и робот с двумя датчиками со сложным алгоритмом движения.
Можно использовать робота-пятиминутку, добавив к нему датчик освещенности, смотрящий вниз. В качестве поля мы использовали готовый вариант для состязаний биатлон (Hello Robot).
Робот с одним датчиком освещенности.
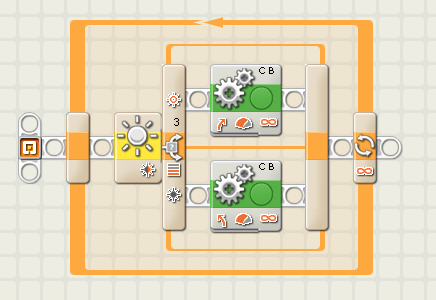
Принцип ничем не отличается от того, по которому робот ехал вокруг препятствия. Подробно не останавливаюсь.
Замечу только, что в нашем случае время движения было порядка 50 секунд.
Движение с помощью двух датчиков освещенности.
Тут усложняется программа, поскольку нужно смотреть показания уже не одного датчика, а двух.
Всего возможно 4 варианта:
| Состояние | Первый датчик (левый) | Второй датчик (правый) | Действия робота |
| 1 | Светлое | Светлое | Едет прямо |
| 2 | Светлое | Темное | Едет направо |
| 3 | Темное | Светлое | Едет налево |
| 4 | Темное | Темное | Едет прямо |
В программе это реализуется так:
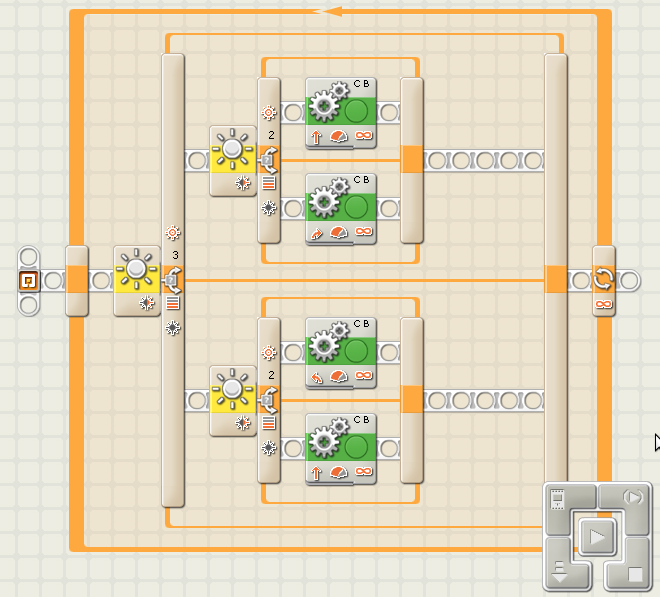
И тут ребятам была дана полная свобода действий: параметры поворотов они должны были подобрать сами. Были успехи и неудачи. Главное – заразиться духом соревновательства ;)
Среднее время было порядка 20 секунд.
Сложный алгоритм движения (мощность моторов высчитывается на основе показаний датчика) трудноват пока для ребят, мы с ним познакомились только теоретически. Но я собрал робота именно с таким алгоритмом. ребята убедились, что он действительно лучше (мой робот превзошел по времени всех роботов ребят).
Небольшой фрагмент итогов дня: