Еще одно направление в соревнованиях лего-роботов – биатлон.
Поле для него выглядит следующим образом:
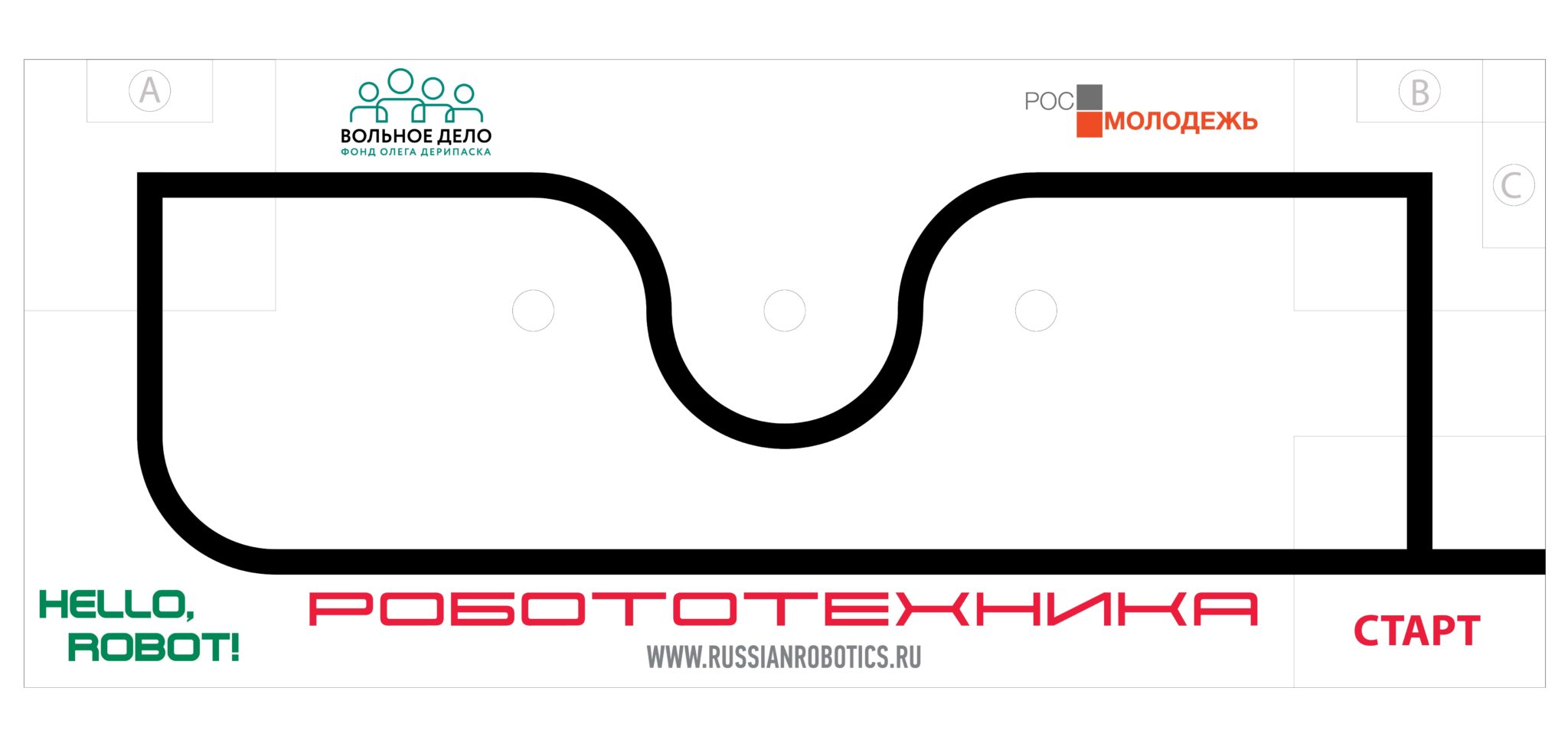
В зонах А, В. и С находятся кегли на возвышении высотой 10 см.
Задание, как правило, следующие: необходимо проехать по полю в направлении по часовой стрелке, при этом какие-то кегли надо сбить, а какие-то привезти на финиш.
На соревнованиях в ДПиШ г. Челябинска, которые проходили 21 апреля, было необходимо сбить кеглю А, а В и С привезти на финиш.
К сожалению, тренировались мы на одноразовых стаканчиках.
Реальные банки оказались не под силу нашему роботу
Сам по себе робот представляет следующее:

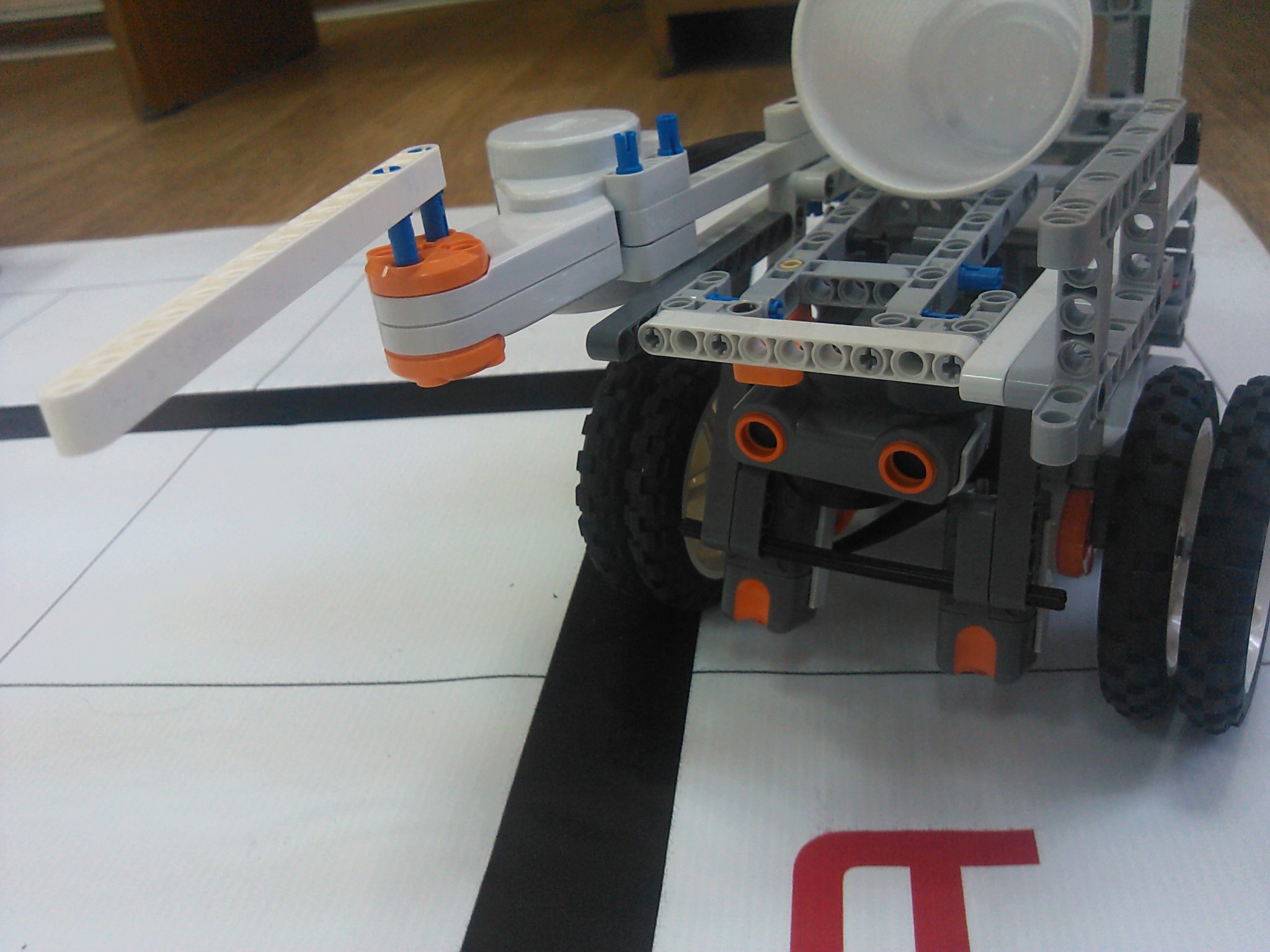

Главный недостаток – захват. Он оказался неэффективен.
Гораздо функциональнее захваты, наподобие тех, что собирались для соревнований WRO Ван Гог.
Зато очень хорошо себя показал алгоритм движения по черной линии. О нем в следующих записях.
где можно узнать как писать программу для биатлона ?
Само программирование вот.
Хотелось бы узнать программу робота
Сейчас как раз готовлю публикацию по программе. На следующей неделе будет.