Итак, мы подошли к самому главному – к программированию.
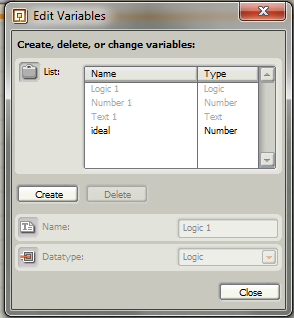
Поскольку значение идеальной точки может понадобиться в программе не один раз, а тянуть нитки через всю программу довольно неудобно, лучше всего завести под хранение этой величины отдельную переменную: Edit -> Define Variables
Заведем новую переменную (Create) типа Number (число), назовем ее Ideal.
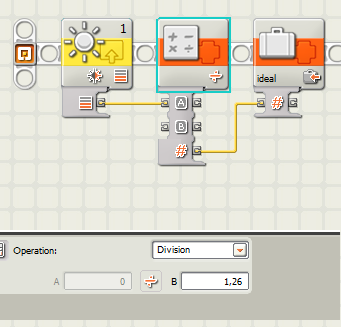
Первым действием в программе необходимо задать значение этой переменной. Для этого надо считать значения датчика освещенности и разделить на коэффициент пропорциональности
Теперь само движение по черной линии.
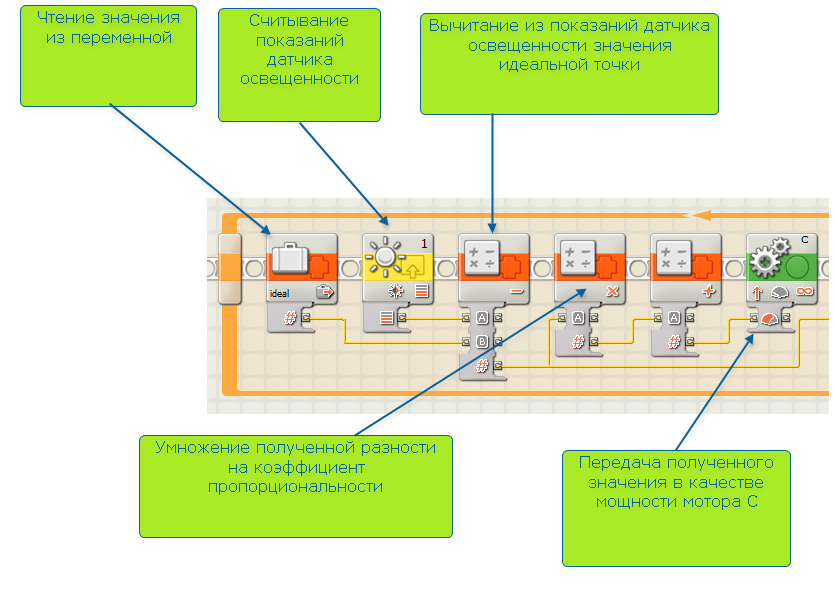
Нетрудно догадаться, что вторая часть нитки, выходящая из вычитания, идет к аналогичной последовательности блоков для мотора В, за исключением того, что там результат умножения не прибавляется к базовой мощности, а вычитается.
Данный алгоритм мы использовали для робота в состязании “Биатлон” (Hello Robot).
Результат работы можно посмотреть:
Как адаптировать эту программу для EV3?
В EV3 есть аналогичные блоки.
Пожалуйста скиньте программу биатлон nxt
Программа выложена вот тут
http://andrewrogov.ru/2014/03/%d0%bf%d1%80%d0%be%d0%b3%d1%80%d0%b0%d0%bc%d0%bc%d0%b0-%d0%b4%d0%bb%d1%8f-%d1%81%d0%be%d1%80%d0%b5%d0%b2%d0%bd%d0%be%d0%b2%d0%b0%d0%bd%d0%b8%d1%8f-%d0%b1%d0%b8%d0%b0%d1%82%d0%bb%d0%be%d0%bd-%d0%b2/
И мне если можно скиньте программу pakhkirill@gmail.com
Программа уже давно выложена вот тут ;)
http://andrewrogov.ru/2014/03/%D0%BF%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0-%D0%B4%D0%BB%D1%8F-%D1%81%D0%BE%D1%80%D0%B5%D0%B2%D0%BD%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D1%8F-%D0%B1%D0%B8%D0%B0%D1%82%D0%BB%D0%BE%D0%BD-%D0%B2/
скиньте плиз программу и инструкцию по сборке робота для соревнований по FLL 2013-2014 буду очень благодарен:)))))
В сезоне 2013-2014 мы не принимали участие. Максимум чем могу помочь – это инструкция модели к прошлому сезону.
Ссылка на скачивание.
aleks.centre@mail.ru скиньте пожалуйста полностью программу
Алексей, следите за обновлениями сайта ;)
Программу выложит вот в этой записи
Пожалуйста, если возможно киньте полностью эту программу на почту, очень выручите lev-ev@mail.ru
Ответил на почту.